MUSTAFA SERDAR SÖKMEN
Avionics & Autonomous Systems Engineer
“Never interrupt your enemy when he is making a mistake.”
— Napoleon Bonaparte
Hi, I’m Serdar Sökmen, an Electrical & Electronics Engineering student and licensed UAV pilot focused on VTOL UAVs, flight control systems, and autonomous avionics.
My work bridges control theory, simulation-based validation, and real-world embedded flight systems.
🏆 Featured Project — METU VTOL 2025
Role: Team Leader • Avionics Lead • Flight Control Algorithm Designer
Our team designed a Tilt-Rotor VTOL UAV capable of vertical takeoff and efficient forward flight.
The project was selected as a Finalist in the METU VTOL Aircraft Competition 2025.
Platform Overview
- Configuration: Tilt-Rotor VTOL
- MTOW: ~8 kg
- Propulsion: 4 motors (front pair with 90° tilt mechanism)
Problem
Designing a stable and safe transition between vertical and forward flight under strict weight, reliability, and controllability constraints.
Approach
- Designed avionics and control architecture around Pixhawk & STM32
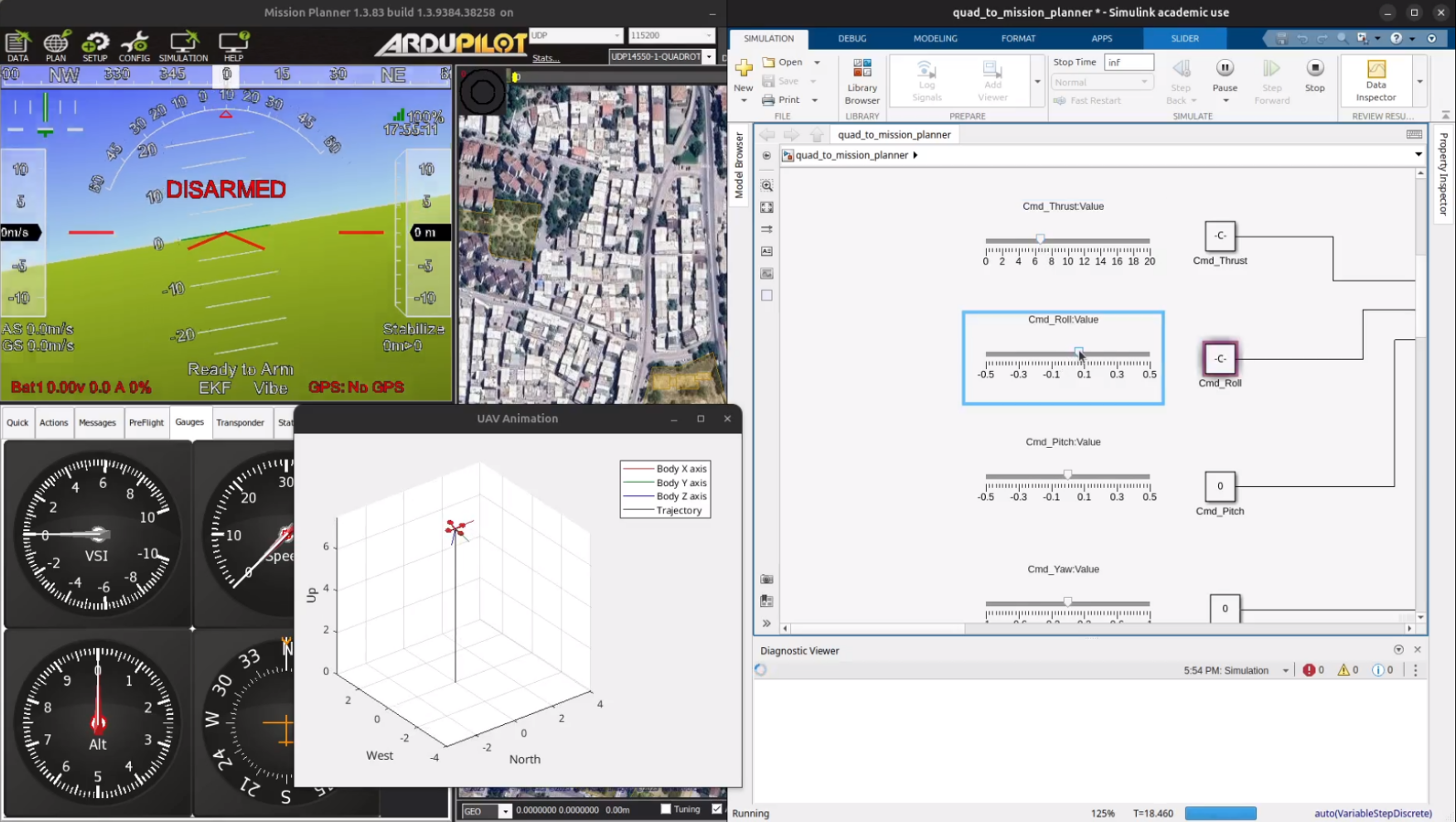
- Validated transition logic and system behavior in MATLAB/Simulink & Gazebo (SITL)
- Integrated mission planning and fail-safe logic using ArduPilot
Outcome
- Achieved stable VTOL transition behavior in simulation
- Control logic validated through real-flight preparation and testing workflows

🧠 Control & Simulation Projects
This section represents my simulation-driven development workflow, where control strategies are validated before real-world deployment.
🚁 6-DOF Flight Control & Visual Servoing
Context
Autonomous target tracking for UAV operations using onboard vision.
Approach
- Built a full 6-DOF simulation environment
- Implemented vision-based feedback with PID control
- Tested robustness against disturbances and target motion
Result
- Successful real-time target tracking
- Stable control response under simulated uncertainties
Tech Stack
- MATLAB, Simulink, Computer Vision Toolbox
⚡ Hybrid Power Management System (HAK)
Context
Ensuring flight safety during power-source failures in hybrid UAV systems.
Approach
- Designed a hybrid power switching system (Hydrogen Fuel Cell → Li-Po)
- Modeled electrical behavior using Simscape Electrical
- Implemented logic using Stateflow
Result
- Verified seamless source switching under 5 ms
- Zero voltage drop observed during transition
Tech Stack
- Simscape Electrical, Stateflow

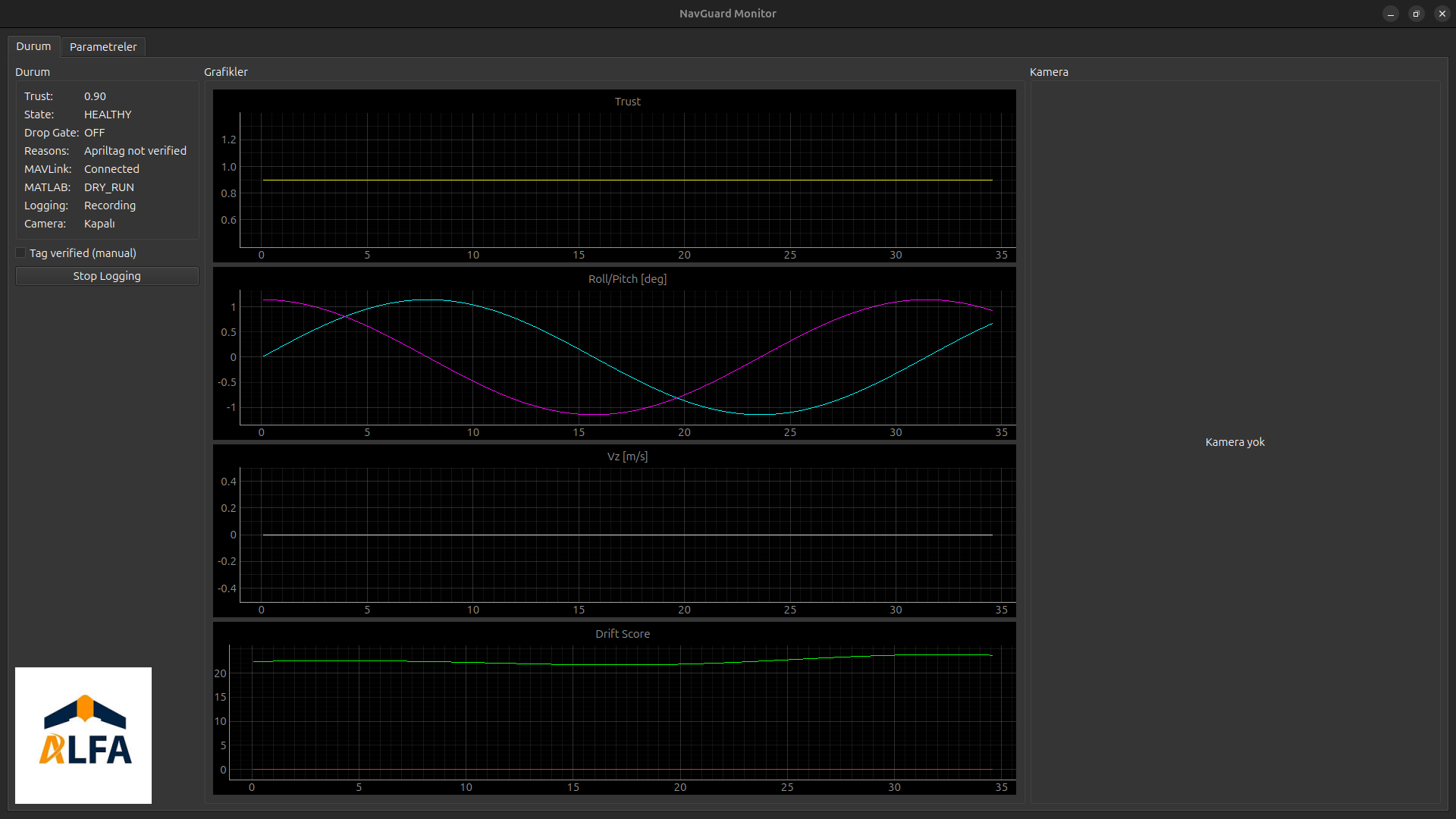
NavGuard – Navigation Integrity & Safety Layer for UAVs
NavGuard is an ongoing navigation integrity monitoring and decision-support system designed to improve UAV operational safety under unreliable GNSS conditions.
Rather than assuming GPS reliability, the system evaluates navigation consistency from telemetry data and state estimation, producing a real-time trust score that can gate mission-critical actions.
NavGuard is being actively developed and tested in simulation (ArduPilot SITL), with scenario-based simulations and telemetry analysis continuing to refine detection logic, decision thresholds, and system robustness.
Status: Active development — simulation and validation in progress.
🛠 UAV Platforms & Prototypes
A collection of UAV platforms built and flown as part of my hands-on development experience.
✈️ Fixed-Wing UAV
Long-endurance platform used for manual flight testing and aerodynamic evaluation.
🚁 Quadcopter UAV
Testbed for PID tuning, sensor integration, and flight controller configuration.
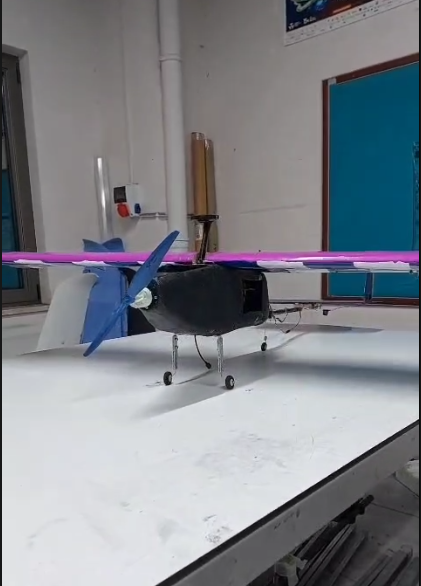
🚀 VTOL UAV (Tilt-Rotor Prototype)
Experimental platform for transition dynamics and control architecture testing.
 —
—
📺 Flight Test Archive
A collection of flight logs, PID tuning sessions, VTOL transition experiments, and raw telemetry data used for control validation and performance analysis.
View Flight Test Archive (Google Drive)
🤖 Software & Automation Projects (Supporting Work)
Autonomous Content Processing & Decision System
A Python-based RPA system that autonomously analyzes media content, makes copyright decisions, performs audio/video processing, and publishes outputs without human intervention.
System Capabilities
- Copyright detection via audio fingerprinting
- Autonomous decision-making for audio preservation or replacement
- Fully automated rendering and publishing pipeline
Relevance Demonstrates system-level decision logic, automation pipelines, and robust software architecture, complementing my embedded and control-focused UAV work.
Tech Stack
- Python, Playwright, FFmpeg, MoviePy, ShazamIO, Edge-TTS
🎓 Education & Certifications
B.Sc. Electrical & Electronics Engineering — Bursa Technical University
(3rd Year Undergraduate)
- UAV-1 Commercial Pilot License — SHGM
- MATLAB & Simulink Proficiency — MathWorks File Exchange Contributor
© 2025 Serdar Sökmen — Powered by GitHub Pages